設計・開発のオンラインマガジン
会社のニュース



専門分野からの建設と開発に関する業界ニュース

ケーブルとワイヤー
PTFEおよびPFASフリーのチェーンフレックスケーブル

動力伝達
新しい製造技術によりクラウンギアの生産が向上

IPC
拡張現実品質を備えた元保護されたタブレット





支店からの建設と開発に関する業界ニュース


自動車
IO モジュールが ReSat の水素充填ステーションを確保


モバイル機械
柔軟でカスタマイズ可能な農業技術のゲートウェイ








業界フェアニュース
カメラベースのセンサーソフトウェアはロボットハードウェアを簡素化します
- 詳細
- ヒット数:8482
スタートアップ Rovi ロボットビジョン XNUMX人の研究者による トゥーミュンヘン は、あらゆる種類のロボットのハードウェアを大幅に簡素化することを使命としています。彼らの研究に基づいて、チームは高価な従来の電子機器を使用することに世界で初めて成功しました。 センサー 新しいソフトウェアと一般的なカメラに置き換えられます。 の直接制御オプションのため、 モーター 発明者を使った グラブ の Gimatic.

コンテンツ
ロボティクスのセンサー ソフトウェアは、感じるのではなく見る
博士 Clemens Schuwerk、ミュンヘンの新興企業 Rovi Robot Vision の制御エンジニアリング、マーケティング、およびセールスは、ソフトウェア、カメラ、 画像処理 の高価な従来の電子センサー ロボット 代わりの。 また、Gimatic のグリッパー技術も含まれています。 講演は、7 年 2018 月 XNUMX 日にイタリアのロンカデルで開催された貿易記者会見で行われました。

インテリジェント ロボット用のカメラ ベースのセンサー ソフトウェアのアイデアは、このテーマに関する博士論文から生まれました。 自律型ロボットシステムのための視覚・触覚環境認識 共同創設者 Dr.-Ing による。 Nicolas Alt. ロボット掃除機が触覚マッピングの障害に意図的かつ繰り返し遭遇する様子を観察することに着想を得て、彼は博士号取得中にモバイル ロボット プラットフォーム用の触覚センサーを開発しました。 センサーは単純なフォームビームで構成されており、ロボットに既に取り付けられているカメラによって観察され、ソフトバンパーとしても機能します。
 同じコンセプトが、現在グリッパーの指に取り付けられている触覚センサーにも当てはまります」と説明します。 博士 Clemens Schuwerk、Rovi Robot Vision の制御エンジニアリング、マーケティング、セールス。 「その後、外部カメラを使用してパッシブ要素と組み合わせて、ロボット用の他のセンサー、つまり力-トルクセンサーと 角度センサー。「XNUMXつのセンサーの概念はすべて特許取得済みまたは特許出願中です。
同じコンセプトが、現在グリッパーの指に取り付けられている触覚センサーにも当てはまります」と説明します。 博士 Clemens Schuwerk、Rovi Robot Vision の制御エンジニアリング、マーケティング、セールス。 「その後、外部カメラを使用してパッシブ要素と組み合わせて、ロボット用の他のセンサー、つまり力-トルクセンサーと 角度センサー。「XNUMXつのセンサーの概念はすべて特許取得済みまたは特許出願中です。
博士ニコラス・アルト と博士Clemens Schuwerk は、同じ椅子で博士号を取得しているときにお互いを知り、最終的にグループの 2016 番目である M. Sc になりました。 Stefan Lochbrunner はすぐに力を合わせて、新技術のさらなる開発と商品化を行い、会社をスピンオフしました。 XNUMX 年に研究プロジェクトから派生したプロジェクトが誕生しました。 このプロジェクトは現在、連邦経済エネルギー省の資金調達プログラムである EXIST Forschungstransfer によって資金提供されています。 研究.
センサソフトウェア技術の原理
センサー ソフトウェアは、複雑なハードウェア ベースのセンサー システムを置き換え、ロボットがそれを実行できるようにします。 見て感じる. 技術革新には、関節位置、位置、把持力、接触プロファイル、および画像処理と、アームの周囲またはグリッパーに外部に取り付けられたカメラを使用したその他の触覚または触覚接触情報の堅牢な測定が含まれます。
 協働ロボットおよび産業用ロボット用のロボットグリッパー、EOAT、グリッパーキット
協働ロボットおよび産業用ロボット用のロボットグリッパー、EOAT、グリッパーキット
この斬新なセンサーのコンセプトは、 人間にたとえてわかりやすく説明する: 目を閉じていると、人は手足の位置と関節の位置の認識が不正確であるため、腕の位置を不正確にすることしかできません。 クラシック 産業用ロボット 彼らは通常「ブラインド」で動作しますが、人間とは対照的に、エンドエフェクターの非常に正確な位置決めを実現するために、剛性の高い構造と一緒に非常に正確なセンサーを使用します。
一方、人間も使用します。 視覚 したがって、物体の正確な操作を可能にするマルチモーダル情報処理。 同様に、Rovi のソフトウェアベースのセンサー技術により、関節の位置が XNUMX つになります ロボットアーム位置や把持力だけでなく、安価なカメラを使用して記録されるため、ロボットが物体と正確かつ自律的に対話できるようになります。

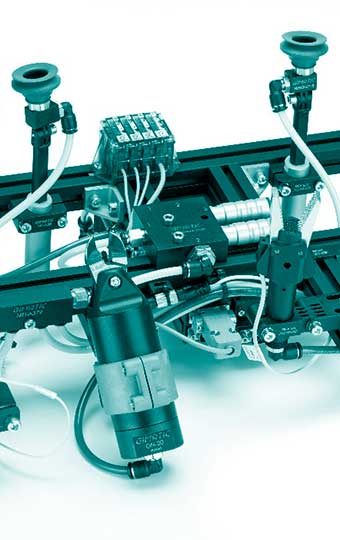
ソフトウェアは、 関節位置 1 ロボットアーム 画像解析アルゴリズムを使用して XNUMX 次元空間で。 力-トルク センサーと触覚センサーは、安価なフォームなどの単純な受動的な柔軟な要素に置き換えられます。 接触力は、これらの要素の特徴的な変形につながります。 ソフトウェアはまた、画像解析手法を利用してこの変形を測定し、材料モデルを使用して存在する力とモーメントを計算します。 センサー ソフトウェアは、完全なロボット システム、ロボット アーム、グリッパー、またはモバイル ロボット プラットフォームに適用でき、これらのシステムのインテリジェントな制御を可能にします。
Rovi ソフトウェア 多数のセンサーを置き換えます ロボットシステムでは、とりわけ、 ケーブル接続労力が減る。 さらに、高感度であると同時に費用対効果の高いロボットの実現を可能にします。 これらの産業用カメラは、非常に費用対効果が高く、非常に強力であるためです。 同時に、それらはロボットの環境認識に不可欠であるため、すでに多くのロボットに搭載されています。
 産業用ロボット、コボット、およびハンドリング用のハーモニック ギア
産業用ロボット、コボット、およびハンドリング用のハーモニック ギア
外部経由の現在のロボット構成から カメラとソフトウェア 測定されます ファスナー 必ずしも可能な限り頑丈に構築され、高精度で製造される必要はありません。 代わりに、準拠した要素と材料、および精度の低い単純な製造プロセスを使用できます。 これにより、コストを節約し、複雑な保護システムを回避できます。 ただし、柔軟な要素では、従来のように関節位置と剛体ロボット モデルを使用してアームの位置を計算することはできません。 一方、Rovi ソフトウェアに外部カメラを接続すると、変形もカメラによって記録されるため、アームとエンド エフェクタの位置を正確に計算できます。
また、 工業用グリッパー 今後ますますカメラがスタンダードになっていくでしょう。 多くの場合、これらのカメラは、説明したソフトウェア ベースのセンサーに使用できます。
従来のロボットと比較した特性
 従来のハードウェア センサー ポイントを備えた産業用ロボット アーム 非常に高い絶対精度 このために特別に設計されているため、0,1 mm 未満で高いジョイント速度を実現します。 ハードウェア センサーは、ここで 1 kHz を超えるサンプリング レートを提供できます。 「これらの価値と競合することは、私たちの技術の目標ではありません」と、Dr. 履物。
従来のハードウェア センサー ポイントを備えた産業用ロボット アーム 非常に高い絶対精度 このために特別に設計されているため、0,1 mm 未満で高いジョイント速度を実現します。 ハードウェア センサーは、ここで 1 kHz を超えるサンプリング レートを提供できます。 「これらの価値と競合することは、私たちの技術の目標ではありません」と、Dr. 履物。
「未知で変化しやすい環境でのロボットに関連する対策は、 ロボットとターゲット間の相対精度. ここに地形が表示されます。 カメラで補完された産業用アームと同様に、カメラベースのターゲット オブジェクトの位置推定によって制限されます。 シンプルなカメラを使用した典型的なセットアップでは、約 1mm になります。 Ultra HD カメラでは 0,3 mm 未満が許容されます。 <45°/s の速度を目指しています」と Clemens Schuwerk 氏は説明します。 これは、「ケージの外」のロボットにとって安全な選択であり、多くの既存のロボットでも使用されています。
触覚の正確さと 力トルクセンサー カメラの設定 (距離、解像度) に大きく依存します。 通常、5% 未満の精度が達成されます。これは、ミッドレンジのハードウェア センサーの精度に匹敵します。
一体型カメラ付きインテリジェントグリッパ
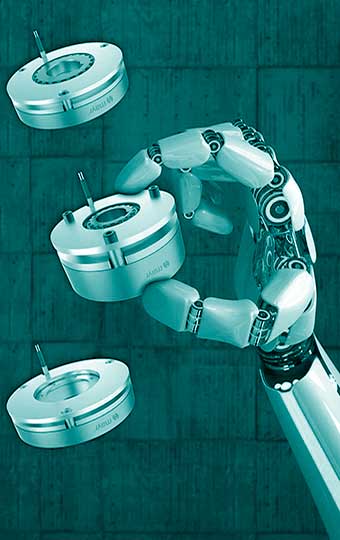
のために インテリジェント グリッピング システム 統合されたステレオ カメラ システムとカメラベースのセンサーを備えた、Gimatic の 1630 ジョー グリッパー MPLMXNUMXHAN が使用されました。 一方では、これは現在のサイズの小さな部品をピッキングする用途によく適合します。 「最も重要なことは、モーターを直接制御できる代替グリッパーを市場で見つけることができなかったことです」と若い起業家は回想します。 このインターフェイスは、ソフトウェアからのセンサー データを使用して把持プロセスをインテリジェントに制御および監視できるようにするために重要です。
Gimatic グリッパーにより、 エンジンへのオープンインターフェース プロトタイプの迅速かつ簡単な開発。 「ここでは高品質でテスト済み/実証済みのハードウェアを使用していますが、ソフトウェアのコア トピックに集中することができます。 Schuwerk およびさらに: 「私たちのような若いスタートアップにとって、利用可能な限られたリソースを効率的に使用することは特に重要です。 このようにして、パイロット顧客として製品を迅速に入手し、得られたフィードバックを使用して製品をさらに開発することができます。」
開発の課題
「ロボットの構築は、通常、小さなチームで力学、電子工学、制御、ソフトウェア、コンピューター ビジョンなどのさまざまな分野を習得するための課題です。 また、分野ごとに別々の開発プロジェクトを行うことも避けなければなりませんでした」と Dr. クレメンス・シュワーク。 ただし、Rovi のコア コンピテンシーはソフトウェアの分野にあるため、若い起業家はハードウェアを必要としていました。 既存のコンポーネントを使用する.

「ロボティクス用のオープンおよび/またはモジュラー ハードウェアの入手可能性は非常に限られているため、デモ システムの構築が困難になっています。 履物。 「市場にモーターへの「オープンな」インターフェースが他にないため、Gimatic のグリッパーを決定したのはまさにこの理由でした。 次のような特定のサブシステムの他のパートナーを引き続き探しています。 ロボット関節 そして歯車。 結局のところ、ソフトウェアは継続的に開発される必要があり、主な目的は顧客やパートナーと緊密に連携することです。
新しいアプリケーション分野を開くには
 伝統的な 産業用ロボット 材料の取り扱い、組み立て、またはロジスティクスに使用されるものなどは、今日、ほとんどが特定のアプリケーションに合わせて事前にプログラムされたスペシャリストです。 彼らは通常、24 日 XNUMX 時間、週 XNUMX 日、確実に仕事をこなします。
伝統的な 産業用ロボット 材料の取り扱い、組み立て、またはロジスティクスに使用されるものなどは、今日、ほとんどが特定のアプリケーションに合わせて事前にプログラムされたスペシャリストです。 彼らは通常、24 日 XNUMX 時間、週 XNUMX 日、確実に仕事をこなします。
「私たちの技術では、しっかりと定義された、または事前にプログラムされたタスクに非常に短いサイクル時間が必要な従来の自動化技術アプリケーションを対象としていません。 当社のセンサー ソフトウェアが可能にします 新しいロボットアームとグリッパー繊細かつ自律的に動作しますが、技術的には非常に単純化されているため、非常に安価に製造できます」と、使用のためのビジョンの共同創設者は説明しています.
したがって、スタートアップはロボットの使用を可能にします まったく新しい市場で 今日の技術では経済的に実現不可能なアプリケーション。 アプリケーションの例は、産業のすべての分野で見つけることができますが、ロジスティクス、 農業、食品産業、またはロボットが急速に変化する製品構成に適応しなければならない分野で使用されます。 中期的には、研究者はこの技術のアプリケーションだけでなく、一般に非常に大きな価格圧力がある家庭用アプリケーションにも適用すると考えています。
最初の成功と未来への展望
初めて、カメラベースのセンサーソフトウェア テーブルロボットアーム 上の ハノーバーメッセ 2018年に発表。 スタンドへの訪問者からの反応は非常に好意的でした。 「業界の主要な意思決定者と話をし、当社の製品を紹介することができました。 同時に、幅広い業界の多数のユーザーと話をすることができました。 これにより、これまで考えもしなかったセンサー ソリューションのまったく新しいアプリケーションの可能性が生まれました。」 履物。 ところで、Rovi は XNUMX 月に AUTOMATICA ミュンヘンに代表される。
若いスタートアップとして、XNUMX 人の研究者はパイロット顧客のためにこの技術を使用するという主な目標を追求しています。 そこにいる 先見の明のある起業家を探しています、そのプロセスは、インテリジェントで費用対効果の高いロボット システムで改善および自動化できます。 長期的には、ロボット システムのメーカーやインテグレーターにライセンス供与するこのセンサー ソフトウェアのプロバイダーとしての地位を確立しています。
博士による講義クレメンス・シューワーク
あなたは下記にもご興味がおありかもしれません...





