アイン ロボットアーム などのさまざまなコンポーネントで構成されています ドライブ, センサー、コントローラーおよびエンドエフェクターであり、その一部はロボットのフランジに統合されています。 一部のメーカーが提供している ロボットアーム さまざまな業界のニーズに適応できる柔軟なモジュール性を備えています。 ロボット アームを探している場合は、ここで紹介されているプロバイダーのいずれかに問い合わせる価値があります。

コンテンツ
- 低コスト協働ロボット用のバイオニックロボットハンド
- Robco ロボットキット用の安全ブレーキ
- ロボットアームで狭い穴も掃除
- 人間 - ロボット協調のためのバイオニックロボットアーム
- IO-Link付きのロボットフランジは配線を不要にします
- 材料共生型防滴ロボットアーム
- スマートファクトリーは完全な垂直統合を実証します
- ロボットキットの運動学の組み合わせ
- シンプルなタスクのための無駄のないロボティクス
- Häufiggestellte Fragen
低コスト協働ロボット用のバイオニックロボットハンド
 30.11.2023 年 XNUMX 月 XNUMX 日 | したがって、 コボット反乱軍 実際に動作させるには、グリッパーや吸盤などの適切なエンドエフェクターが必要です。 Igus は、ウェブサイトでさまざまなメーカーから幅広い選択肢を提供しています。 マーケットプレイスRBTX.com。 単純にプラグアンドプレイできるロボットハンドを求める顧客の要望があったため、 コボット 接続できる IGUS フィンガーグリッパーを開発しました。
30.11.2023 年 XNUMX 月 XNUMX 日 | したがって、 コボット反乱軍 実際に動作させるには、グリッパーや吸盤などの適切なエンドエフェクターが必要です。 Igus は、ウェブサイトでさまざまなメーカーから幅広い選択肢を提供しています。 マーケットプレイスRBTX.com。 単純にプラグアンドプレイできるロボットハンドを求める顧客の要望があったため、 コボット 接続できる IGUS フィンガーグリッパーを開発しました。
Robco ロボット アーム キット用の安全ブレーキ
 27.08.2023 年 XNUMX 月 XNUMX 日 | 会社 ロブコ モジュラーを提供します ロボット工学-キット 工業生産用。 ロボットアームでは、マイヤーパワートランスミッションの標準モジュラーシステムによるスリムで軽量なロボットブレーキが必要な安全性を確保しています。
27.08.2023 年 XNUMX 月 XNUMX 日 | 会社 ロブコ モジュラーを提供します ロボット工学-キット 工業生産用。 ロボットアームでは、マイヤーパワートランスミッションの標準モジュラーシステムによるスリムで軽量なロボットブレーキが必要な安全性を確保しています。
ロボットアームで狭い穴も掃除
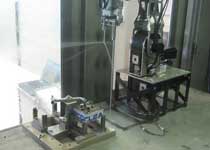 06.12.2022 | 会社 エコクリーン 部品洗浄のスペシャリストです。 洗浄セルでプロトタイプを洗浄するアプリケーションでは、適切な洗浄プロセスを見つける必要があります。 XNUMX台でテストしました ロボリンクDP 水しぶき ロボットアム。
06.12.2022 | 会社 エコクリーン 部品洗浄のスペシャリストです。 洗浄セルでプロトタイプを洗浄するアプリケーションでは、適切な洗浄プロセスを見つける必要があります。 XNUMX台でテストしました ロボリンクDP 水しぶき ロボットアム。
人間 - ロボット協調のためのバイオニックロボットアーム
09.05.2019 年 XNUMX 月 XNUMX 日 | 自由で柔軟な動きか、定義されたプロセスか - 構成とマウントに応じて グラブ モジュラーはできますか 空気圧 軽量ロボットから フエスト 人間とロボットのコラボレーションという観点から、さまざまな用途に適しています。
IO-Link付きのロボットフランジは配線を不要にします
09.05.2019 年 XNUMX 月 XNUMX 日 | ワイヤレス IO-Link 規格に基づいて、 部屋グループ 有線メカトロニクスグリッパーを使用したインテリジェントロボットフランジを発表 無線IOリンク 接続されています。 多くの場合、ロボット フランジにより外部ロボット ケーブル配線が不要になります。 ロボットからは電源のみが供給され、情報は無線リンクを介してインテリジェントロボットのフランジからコントローラーに送信されます。
材料共生型防滴ロボットアーム
 15.12.2020年XNUMX月XNUMX日 | ロボットの機構は、湿気の多い環境ではすぐに攻撃を受けます。 Igus にはそのような用途向けの製品があります 低コストの自動化 Robolink モジュラー システムから IP 44 ロボット アームを開発しました。 彼はあなたと一緒に行くことができます 水しぶき 連絡する。
15.12.2020年XNUMX月XNUMX日 | ロボットの機構は、湿気の多い環境ではすぐに攻撃を受けます。 Igus にはそのような用途向けの製品があります 低コストの自動化 Robolink モジュラー システムから IP 44 ロボット アームを開発しました。 彼はあなたと一緒に行くことができます 水しぶき 連絡する。
スマートファクトリーは完全な垂直統合を実証します
 29.03.2019/XNUMX/XNUMX | これまで、粗雑な協働ロボットを担当 コボット これからも、人々とともに、もっともっと活動をしていきたいと思います。 ハーティング は、顧客やパートナーと協力して「機転を利かせて」数多くのシナリオとテクノロジーを紹介します。
29.03.2019/XNUMX/XNUMX | これまで、粗雑な協働ロボットを担当 コボット これからも、人々とともに、もっともっと活動をしていきたいと思います。 ハーティング は、顧客やパートナーと協力して「機転を利かせて」数多くのシナリオとテクノロジーを紹介します。
黄色い小さな箱には「パパからルーカスへ」と書かれています。 その少し前に、Kuka 軽量ロボットが Harting の刻印が入った白い Siku 車をそこに置きました。 別 クカ ロボットはそれを運転して、見本市の来場者を通り過ぎて、次の生産セルに移動します。そこではすでに XNUMX 台目の車両がルーカスを待っています。 お父さんは、特別に設計された Web コンフィギュレーターで数日前に注文し、携帯電話の QR コードを使用してハノーバー フェアのハーティング スタンドに注文を届けてもらいました。
スマートファクトリー ハイイ は、おもちゃの車を使用して、顧客から製品の柔軟な製造までの完全な垂直統合を実証し、自律制御されながら完全にネットワーク化された生産セルに分割します。 各生産セルでの作業は、Kuka の軽量ロボットによって実行されます。 商品は移動式 Kuka Iiwa ロボットによってセル間で輸送されます。
Mica Network のパートナー企業である Perfact Innovation も、システムとロボットのデジタル ツインを作成しました。 これにより、生産プロセスのデジタル イメージが生成され、リモート メンテナンスや状態監視を視覚化および簡素化するために使用できます。 Expleo 社は力の瞬間を読み取ります ロボットグリッパ 摩耗の兆候を検出するにはオフにします。 この目的のために、Microsoft Azure クラウド内のデータが評価され、履歴データと比較されます。 したがって、このシステムは、注文の受信から保管までの最新の生産方法の全範囲を実証します。 見本市のテーマ「統合産業 - インダストリアル インテリジェンス」の精神に基づく接続性。
スタートアップが次世代の組立作業場を構築
摩耗部品や小さな部品をインテリジェントに共同で組み立てる作業場が、 MTEK。 スウェーデンの若い企業は、協働ロボットを備えた組立ワークステーションを展示しています。 双腕の ABB ロボットは小さな物体を認識して掴むことができ、人間と一緒に組み立てや手作業に使用されます。

MTEK のビジネス モデルは、プロセスの実行と制御のための「Software-as-a-Service」です。 「マイカと RFID により、組立作業場とプロセス フローが完全なトレーサビリティを備えた統合ユニットになります」と、ある氏は満足そうに言います。 オラフ・ヴィルムスマイヤー、Harting 社の事業開発マネージャー RFID がスウェーデンとの協力について語る。 ウィルムスマイヤー氏は、UHF RFID技術の統合においてMTEKを支援しており、昨年の見本市でのハイライトのXNUMXつであったノキアとの共同「ファクトリー・イン・ア・ボックス」プロジェクトで同社のことをすでに知っている。
人間の掴みプロセスのレプリカ
 一方、研究者たちはロボットアームやロボットのグリッププロセスの理解に取り組んでいます。グリッパー 触覚知覚をさらに発展させ、豊かにするために。 Shadow Robot Company Ltd. と協力して、ハーティングはこの分野におけるテクノロジーがいかに進んでいるかを示します。
一方、研究者たちはロボットアームやロボットのグリッププロセスの理解に取り組んでいます。グリッパー 触覚知覚をさらに発展させ、豊かにするために。 Shadow Robot Company Ltd. と協力して、ハーティングはこの分野におけるテクノロジーがいかに進んでいるかを示します。
英国の企業は、人間の握力プロセスをシミュレートするアルゴリズムを開発するために、人間の手の機能と寸法を備えたロボットハンドを設計しました。 手の特徴 24つのジョイント、そのうち 20 個を個別に制御できます。 メーカーの説明によれば、全方向に回転できるため、物体を正確かつ確実にグリップできます。
その 指先 圧力感度、温度、振動などのさまざまな機能を測定する多機能センサーが統合されました。 ロボットハンドの指先は、スイスの Harting AG Biel で次の技術を使用して作成されています。 3D-MIDテクノロジー (メカトロニクス集積デバイス – 射出成形回路基板)。 これにより、三次元基体に直接センサー機能を搭載することが可能となります。
ロボットキットの運動学の組み合わせ
 24.05.2018 | IGUS 新しいモジュール式ビルディングブロックシステムなど、高性能プラスチックから作られた低コストのソリューションを提供します ロボリンクアピロ. 設計者は、標準、反転、直線運動用の XNUMX つの無潤滑ウォーム ギアから自由に選択できます。
24.05.2018 | IGUS 新しいモジュール式ビルディングブロックシステムなど、高性能プラスチックから作られた低コストのソリューションを提供します ロボリンクアピロ. 設計者は、標準、反転、直線運動用の XNUMX つの無潤滑ウォーム ギアから自由に選択できます。
シンプルなタスクのための無駄のないロボティクス
 31.01.2018 | マーティン・ラーク、プロダクトマネージャー Robolink der IGUS ケルンの GmbH は、カールスルーエの RBS Stutensee の業界プレスデーで低コストのロボット アーム Robolink を発表しました。
31.01.2018 | マーティン・ラーク、プロダクトマネージャー Robolink der IGUS ケルンの GmbH は、カールスルーエの RBS Stutensee の業界プレスデーで低コストのロボット アーム Robolink を発表しました。
Häufiggestellte Fragen
ロボットアームの価格はいくらですか?
ロボットアームの価格 変化する 仕様、メーカー、適用分野によって異なります。 簡単な教育用モデルは数百ユーロ程度で入手できますが、ハイエンドの産業用武器は XNUMX ~ XNUMX 桁の価格になります。 追加機能、精度、耐荷重は価格に大きく影響します。
ロボットアームはどのように動くのでしょうか?
ロボットアーム を通じて働きます アクチュエーター、ジョイント、制御電子機器の組み合わせ。 アクチュエーター (多くの場合電気モーターまたは空気圧モーター) が動きを生み出します。 関節は腕の部分を接続し、正確かつ多様な動きを可能にします。 制御電子機器はプログラミング コマンドを解釈し、それに応じてアクチュエーターを調整してアームを希望の位置に移動します。
ロボットにはどんな種類があるの?
ロボット工学には、用途や設計に応じてさまざまな種類のロボットがあります。 これらには、製造作業用の産業用ロボット、支援作業用のサービス ロボット、人間の動きを模倣するヒューマノイド ロボット、輸送用の移動ロボット、人と作業するための協働ロボットや協働ロボットが含まれます。 それぞれのタイプには特定の機能があり、さまざまな使用分野向けに設計されています。
