設計・開発のオンラインマガジン
会社のニュース



専門分野からの建設と開発に関する業界ニュース

ケーブルとワイヤー
PTFEおよびPFASフリーのチェーンフレックスケーブル

動力伝達
新しい製造技術によりクラウンギアの生産が向上

IPC
拡張現実品質を備えた元保護されたタブレット





支店からの建設と開発に関する業界ニュース


自動車
IO モジュールが ReSat の水素充填ステーションを確保


モバイル機械
柔軟でカスタマイズ可能な農業技術のゲートウェイ








業界フェアニュース
未来の手術ロボットのための油圧駆動
- 詳細
- ヒット数:4642
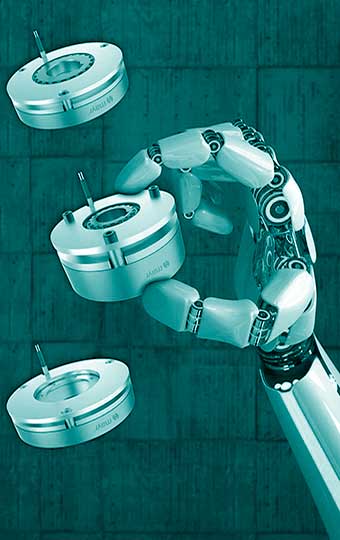
 ロボットは、たとえば細いプローブを適切な場所に配置するなど、医師による腫瘍の検出と治療を支援します。 となることによって ロボット工学 磁気共鳴画像法などの画像処理手順に合わせて、IPA のエンジニアは新しい駆動技術を開発しました。
ロボットは、たとえば細いプローブを適切な場所に配置するなど、医師による腫瘍の検出と治療を支援します。 となることによって ロボット工学 磁気共鳴画像法などの画像処理手順に合わせて、IPA のエンジニアは新しい駆動技術を開発しました。
リスクと副作用のない腫瘍治療? それでも、これは考えられないようです。 しかし、研究室では、科学者はすでに未来の医学のソリューションに取り組んでいます:「研究の主な目標の1つは、健康な組織が破壊されないように腫瘍を非常に正確かつ効率的に治療する低侵襲介入の技術を開発することです」 、フラウンホーファーIPAの医療およびバイオテクノロジーPAMBプロジェクトグループのヨハネスホルシュについて説明します。
イメージングを使用した位置プローブ
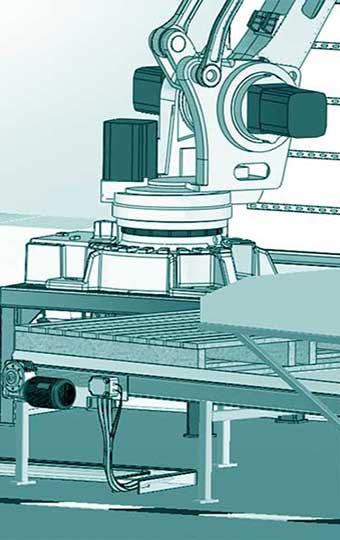
エンジニアはチームと協力してロボットを操作し、その助けを借りて外科医は微細なプローブを正確に配置したり、サンプルを採取したり、腫瘍組織を温熱治療したりできます。 このようなプローブを正確に目的の位置に移動するには、スキルと経験が必要です。医師が針で小さなプローブを導入する場合、医師は画面上の位置を示す画像を使用して自分の向きを合わせる必要があります。 「これまで、X線ベースの方法は通常、イメージングに使用されています。 ただし、これらには、臓器などの軟部組織をあまりよく表していないという欠点があります。 さらに、それらは医師と患者の両方でX線への被曝を増加させます」とHorschは説明します。
最大の問題:ドライブテクノロジー
「将来の可能性が高まるため、磁気共鳴画像法、ショートMRI。」MRI画像の助けを借りてプローブを肝臓、肺、または腸の腫瘍に導きたい医師はすぐに限界に達します。患者は嘘をついており、外科医はほとんど自由に動きません。 この問題を解決するために、世界中のさまざまな研究チームが針の挿入を支援するロボットに取り組んでいます。 「最大の問題はドライブ技術です」とHorsch氏は報告します。 「モーターについては、アクチュエータについて説明していますが、MRIイメージングを妨げる可能性があるため、強磁性体または導電性の材料を使用しないでください。 そのため、従来の電動モーターは不要になりました。「制御が困難な空気圧シリンダーでも適切ではありません。
ドライブの心臓部としてのプラスチック製ベローズ
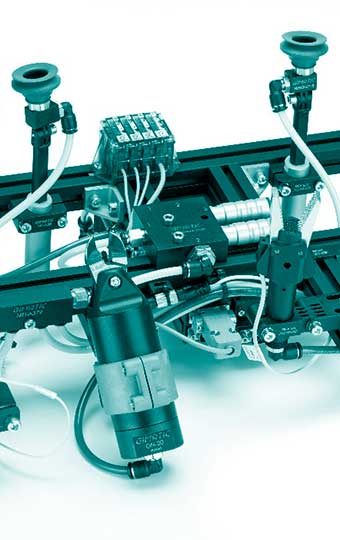
IPAエンジニアのソリューション:油圧ロボットドライブ。 このアクチュエーターの中心には、3D印刷技術を使用して作られたプラスチック製ベローズがあります。 これらは、細い液体で満たされたパイプに接続された小さなアコーディオンのように見えます。 流体が加圧されると、アコーディオンが膨張または曲がります。 このベンドは、たとえばニードルプローブを誘導するロボットアームを動かすために使用できます。
2つの油圧アクチュエータを組み合わせることにより、ロボットアームを2つの空間方向に正確に制御できます。 フォースフィードバックメカニズムのおかげで、外科医は、プローブが抵抗に遭遇するとロボットアームが動くと感じます。 「本当の革新は、アクチュエータにMRI記録を妨げる部品が含まれていないことです」とHorschは要約します。 油圧は小さなスペースで大きな力を発生させることができます。 これにより、MRIチューブ内のスペースの問題が解決されます。 あなたはまだラインの圧力を生成するモーターが必要ですが、これは隣接する部屋で十分にシールドすることができます。
新しいドライブ技術が期待に応えます
マンハイム大学病院での研究により、新しい駆動技術が期待に応えることが明らかになりました。 「これにより、MRI介入のための実用的なロボットベースの位置決めシステムの開発の基礎が築かれました」とHorsch氏は言います。 フォローアッププロジェクトでは、彼と彼のチームは、3D印刷技術を使用して製造されるロボットに曲げアクチュエータをインストールしたいと考えています。 科学者とエンジニアは、医療専門家の訓練に使用されるため、人間の臓器と組織のレプリカに関する前臨床研究でこれをテストしたいと考えています。