ローコード ソフトウェアだけでロボットをプログラミング
- 詳細
- ヒット数:981
アーティマインド ロボティクスがこれをサポート ロボット工学革新的な産業 ソフトウエアソリューションロボットをプログラム、操作、統合する人 産業用ロボット 簡略化する。センサーベースのロボット アプリケーションのパイオニアは、力制御や画像処理などの高度なプロジェクトの実装をサポートし、計画から最適化までの包括的なアドバイスを提供します。 Artiminds の最新情報をお読みください:

コンテンツ
Artimins Robotics – パートナーのノウハウ
 ドイツは世界有数の自動化経済国の一つです。これは現在の数字によって証明されています 国際ロボット連盟 (IFR) また、ロボット密度は新記録レベルに達しました。熟練労働者の不足、リショアリング、コストの圧力により、業界では自動化への圧力が高まっています。
ドイツは世界有数の自動化経済国の一つです。これは現在の数字によって証明されています 国際ロボット連盟 (IFR) また、ロボット密度は新記録レベルに達しました。熟練労働者の不足、リショアリング、コストの圧力により、業界では自動化への圧力が高まっています。
生産にロボットを長年使用してきた企業も、さらに一歩進んで、生産におけるより高度で斬新なプロセスステップを自動化しようとしています。 中小企業 また、コストを削減し、従業員の負担を軽減し、品質を向上させ、小さなバッチサイズでも柔軟性を維持できるように、ロボットベースの自動化への移行を決定する企業も増えています。
一つ持っていれば良いですね あなたの側にいるパートナー 同社は、ロボット自動化のための包括的なソフトウェア ソリューションを提供するだけでなく、初期計画から実装、継続的なサポートとロボット アプリケーションの最適化に至るまで、コンサルティング、サービス、エンジニアリングの形で専門知識を提供します。
アーティマインド そんなパートナーです。この記事では、カールスルーエのスペシャリストによる最新の開発について紹介し、彼から貴重なヒントを得ることができます。
ケーブルハンドリング用のプログラミングロボット
 18.03.2024 年 XNUMX 月 XNUMX 日 | Artiminds Robotics はアプリケーションパークの出展者です ハノーバーメッセ 2024 精密なケーブル処理アプリケーション ケーブルハーネスアセンブリ 前に。センサーベースのロボット自動化は、ラインやケーブルなどの垂れ下がった弛んだ部品の確実な検出、ピッキング、結合を実証します。
18.03.2024 年 XNUMX 月 XNUMX 日 | Artiminds Robotics はアプリケーションパークの出展者です ハノーバーメッセ 2024 精密なケーブル処理アプリケーション ケーブルハーネスアセンブリ 前に。センサーベースのロボット自動化は、ラインやケーブルなどの垂れ下がった弛んだ部品の確実な検出、ピッキング、結合を実証します。
この複合施設に対する自社開発のソリューション アプローチ 2,5Dアプリケーション は、レーザー ライン スキャナー、2D カメラ技術、および力-トルク測定の独自の組み合わせに基づいています。 Artiminds のロボット プログラミング スイート (RPS) には、新しく開発されたインターフェイスとインテリジェント機能モジュールもあります。
ソフトウェアのプロセス リアルタイム スキャン結果を収集し、それをロボットの動きと同期させて、正確なピックアップポイントを決定します。その後、力制御された結合操作が実行され、ケーブル端をコネクタ ハウジングに安全かつ正確に挿入できるようになります。
このデモンストレーションは、メーカーに依存しない、さまざまなアプリケーションの可能性を示しています。 プログラミングソフトウェア アーティマインドのRPS。シンプルで適応性の高い、洗練されたロボットのプログラミングに使用できます。ロボット プログラミング ソフトウェアはネイティブ ロボット コードを生成するため、ハードウェアを追加することなく、使用される産業用ロボットの標準コントローラ上でプログラムを直接実行できます。
「今回紹介したアプリケーションは、当社のソフトウェア製品の多用途性と、それを使用してロボットを使用して複雑な生産プロセスを自動化し、ロボットの新しい応用分野を可能にする方法を示す印象的な例です。」とコメントしました。 Dr.-Ing.スヴェン・シュミット・ロール, Artiminds Robotics社マネージングディレクター。
公差のあるプロセス向けのスマートロボットソフトウェア
 29.02.2024 年 XNUMX 月 XNUMX 日 |従来のアプローチを試してみると、 公差の対象となるプロセス これは多くの場合、自動化することが大きな課題となります。スマート ロボット ソフトウェアを使用すると、信頼性の高いソリューションを非常に簡単に作成できます。さまざまな実装例が幅広いアプリケーションを示しています。
29.02.2024 年 XNUMX 月 XNUMX 日 |従来のアプローチを試してみると、 公差の対象となるプロセス これは多くの場合、自動化することが大きな課題となります。スマート ロボット ソフトウェアを使用すると、信頼性の高いソリューションを非常に簡単に作成できます。さまざまな実装例が幅広いアプリケーションを示しています。
ロボット自動化における最も過小評価されている 5 つの障害
 13.02.2024 年 XNUMX 月 XNUMX 日 |このテーマに取り組む企業が増えています ロボットの自動化。しかし、ノウハウの不足、懸念される高コスト、および事前に計算できないことが多いロボットプロジェクトの複雑さにより、多くのプロジェクトが計画中に失敗しています。
13.02.2024 年 XNUMX 月 XNUMX 日 |このテーマに取り組む企業が増えています ロボットの自動化。しかし、ノウハウの不足、懸念される高コスト、および事前に計算できないことが多いロボットプロジェクトの複雑さにより、多くのプロジェクトが計画中に失敗しています。
に ロボット工学の初心者 ノウハウやプロジェクトの経験が不足しているために、導入は失敗することがよくあります。しかし、すでにロボットの助けを借りてプロセスを自動化し、専門知識を蓄積している企業であっても、事前に十分な計画を立てていなければ限界に達します。なぜなら、かどうかは関係なく、 産業用ロボット または コボット: すべてのロボット プロジェクトには、時間とコストの罠に陥らず、アプリケーションを実用的な方法で実装するために、戦略的に検討、評価、熟考する必要がある側面が数多くあります。構造化された将来を見据えた計画が成功の鍵です。
インクルード 無料のロボット工学ホワイトペーパー Artimins の「自動化のしくみ」では、ロボット使用時に最も過小評価されている 5 つの障害を分析し、起こり得る落とし穴を避けるためにユーザーがどの側面に注意を払う必要があるかを示しています。さらに、さまざまな応用分野とロボットベースのソリューションアプローチも紹介されています。さらに、このホワイトペーパーでは、ロボット統合の戦略的計画と実装、および適切なハードウェアおよびソフトウェア ツールの選択に役立つ対話型のチェックリストを提供します。
ホワイトペーパーは無料 ダウンロード ここ:https://www.artiminds.com/de/robotik-whitepaper-stolpersteine/
センサー適応ロボティクスのパートナー
 22.06.2023 年 XNUMX 月 XNUMX 日 | Artiminds Robotics シリーズ 高度なロボティクス は、Automatica 2023 で自社のソフトウェア ソリューションでプログラムされたアプリケーションを発表します。 Robot Programming Suite (RPS) および Artiminds Learning & Analytics for Robots (LAR) ツールは、ローコード アプローチによりセンサーベースのロボット アプリケーションのプログラミングを簡素化します。これにより、これまで手動でしか解決できなかった本番環境のタスクを自動化できるようになります。
22.06.2023 年 XNUMX 月 XNUMX 日 | Artiminds Robotics シリーズ 高度なロボティクス は、Automatica 2023 で自社のソフトウェア ソリューションでプログラムされたアプリケーションを発表します。 Robot Programming Suite (RPS) および Artiminds Learning & Analytics for Robots (LAR) ツールは、ローコード アプローチによりセンサーベースのロボット アプリケーションのプログラミングを簡素化します。これにより、これまで手動でしか解決できなかった本番環境のタスクを自動化できるようになります。
Automatica で展示されているセンサーベースのアプリケーションは、ケーブル処理、表面処理、機械組み立ての分野から来ています。 Artimins は、インダストリー 4.0 環境におけるセンサー適応ロボット工学の総合的なパートナーとして機能します。
インテリジェントなアルゴリズムのおかげで、新機能を使用して消費電力を削減し、 画像規制されている あたりのプロセス ドラッグ・アンド・ドロップ 事前定義された機能ブロックから簡単かつ堅牢にプログラムできます。 ロボットを使ったさまざまなアプリケーション クカ、ファナックとユニバーサルロボットは、可能なアプリケーションの範囲を実証しています。
Kuka ロボットによるケーブル処理
ハイライトとして紹介 ケーブル- での取り扱い手順 クカ ぶら下がり、ぐったりとした部品を確実に検出、掴み、接合するためのロボット。 この複雑な 2,5D アプリケーション用に Artiminds が開発したソフトウェア ソリューションは、2D レーザー スキャナ、フォース コントロール、特別に開発されたインターフェイス、および Artiminds RPS のインテリジェントな機能ブロックを組み合わせています。 まず、正しいピックアップポイントを見つけるために、ロボットの動きに合わせてスキャン結果が計算されます。 次に、力制御された結合操作が行われます。
ファナックロボットによるラインエンドテスト
アイン ファナック-ロボットは、ライン終了テストでライブティーチポイントの最適化を示します。 ここでは、ロボットが力制御されたテスト ケーブルを挿入します。 エレクトロニクスコンポーネントを使用して、これを再度解決します。 コンポーネントは直線軸を介してワークピースキャリア上で前後に移動します。 ロボットは、アプローチ位置とサイクル タイムのドリフトを補正することで、ワークピース キャリアのさまざまな公差を自動的に補正します。
UR を使用した複雑な輪郭のプログラミング
からの協働ロボット ユニバーサルロボット (UR) は、複雑な輪郭を持つシェル モールドなどの部品のツールパスを作成する方法を示します。 CAD2 パス機能を使用する場合 CAD-ソフトウェアにロードされたモデル。 これからパスが生成され、力の制御の下でたどられます。
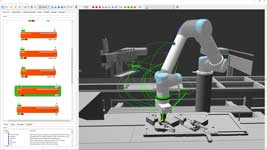
LAR デモは、中央データ ホットスポットとして、XNUMX つのアプリケーションからのすべてのリアルタイム センサー データを集約します。 プロセス中に発生する公差と力は自動的に分析され、評価されます。 実行時間、サイクル タイム、エラー メッセージなどの情報とともに、ダッシュボードは結果を明確に視覚化します。
ドラッグアンドドロップによる素早い起動
新しいユーザー インターフェイスは、特に優れたスコアを備えています。 操作方法 (UX)。 標準ユーザー インターフェイスを備えた PC 上の直観的なエディターにより高い効率が保証され、ドラッグ アンド ドロップを使用して構成ファイルを迅速かつ簡単に作成するオプションが提供されます。 ユーザー エクスペリエンス設計により、KRL への介入は必要ありません。 その後、コマンドはオプション パッケージとしてコントローラー用の Kuka Smartpad ハンドヘルド コントロール ユニットに転送されます。 これにより、ユーザー インターフェイスでのコピー エラーが回避されます。 ロボットはすぐに使用できるようになります。

死 事前設定された インライン フォームを使用すると、コンピューター エディターを人間がより安全に使用できるようになります。 入力エラーはグラフィカル ユーザー インターフェイスに直接表示され、ロボット コントローラーのテスト時に発見されるだけではありません。 Kuka.Usertech インターフェイスは、メーカーのすべてのテクノロジー パッケージと組み合わせることができます。
自動THTアセンブリのロボットプログラミング
30.09.2020/XNUMX/XNUMX | ロボット プログラミング スイート RPS の Artimindのロボット工学 の自動化を可能にします THTアセンブリ。 ロボット プログラミング ソフトウェアは、すべてドラッグ アンド ドロップを使用して、表面のスキャンや接合の制御などの力で制御されるプロセスを産業用ロボットに教えます。
THTアセンブリの主な課題は、 耽溺 の 金属 と プラスチック。 Auch die Toleranzen der Bauteilgehäuse und die vielen Varianten anまた、コンポーネントハウジングと多くのバリエーションの許容誤差 電子部品 erhöhen die Schwierigkeit.難易度を上げます。 Deshalb wird diese filigrane, präzise Arbeit heute meist noch manuell durchgeführt.そのため、この忠実で正確な作業は、今日でもほとんど手動で実行されています。 Sie ist mit einem hohen Aufwand verbunden.それは多くの努力と関連しています。
ドラッグアンドドロップによるロボットの教育
ソフトウェアを使用する ロボット プログラミング スイート RPS Artiminds Roboticsは、ロボットを使用してTHTアセンブリを自動化できます。 ユーザーは、ドラッグアンドドロップを使用したグラフィカルユーザーインターフェイスを介して、ロボットアプリケーションを簡単にプログラムおよび構成できます。 50を超えるテンプレートを備えたライブラリをプログラミングに使用できます。
Die Templates bilden verschiedene Funktionen und Bewegungen ab.テンプレートには、さまざまな機能と動きが描かれています。 Je nach Beschaffenheit des elektronischen Bauteils wählt der Anwender den Steckvorgang aus zwei Suchvorlagen aus.電子コンポーネントの性質に応じて、ユーザーはXNUMXつの検索テンプレートからプラグインプロセスを選択します。 Dieザ・ スパイラル検索 力制御された円形の動きを介して要素を配置し、逸脱した穴を特定することもできます。
 AIベースのロボットキャリブレーションのための研究プロジェクト
AIベースのロボットキャリブレーションのための研究プロジェクト
時 スパイク検索 werden Löcher durch Picken ermittelt.穴はピッキングによって識別されます。 Empfindliche Teile wie Stifte verbiegen dabei nicht.ペンなどの敏感な部分は曲がりません。 Die Parametrierung erfolgt über intuitive Wizards.パラメータは、直感的なウィザードを使用して設定されます。 Diese fragen alle relevanten Daten während der Programmierung ab.これらは、プログラミング中にすべての関連データを照会します。 Kurze Anleitungen per Video unterstützen den User zusätzlich.ビデオによる短い説明もユーザーをサポートします。
オンラインモードとオフラインモードの組み合わせ
RPSの大きな利点は、次の組み合わせにあります。 オンラインプログラミングとオフライン Programmierung.プログラミング。 Offline kann der Roboter auch im laufenden Betrieb eingelernt und das Programm in der Simulation visualisiert werden.ロボットは、操作中にオフラインでティーチインすることもでき、プログラムはシミュレーションで視覚化できます。 Der automatisch generierte Code wird dann direkt in die自動生成されたコードは、に直接入力されます 操舵 übertragen.転送。 Änderungen kann der Anwender offline in der RPS oder online direkt am Roboter vornehmen und in die Software zurückspielen.ユーザーは、RPSでオフラインで変更するか、ロボットで直接オンラインで変更を加えて、ソフトウェアにアップロードできます。 Das spart Aufwand bei der Inbetriebnahme sowie Prozessoptimierung der Roboter und reduziert die Wartung.これにより、ロボットの試運転およびプロセスの最適化の労力が節約され、メンテナンスが削減されます。
RPSプログラムロボットによる表面仕上げプロセス
のアプリケーションで ビソマックス 専門家はこのソフトウェアをロボットプログラミングに使用します。 のための施設 表面仕上げ さまざまなコンポーネントの障害を特定し、力の制御の下でそれらにアプローチし、その後、それらを磨き上げる必要があります。
Artimindがウェビナーにロボット自動化を開始するように通知します
 11.05.2020/20/2020 | Artimins は XNUMX 年 XNUMX 月 XNUMX 日にウェビナー シリーズを開始します ロボットで自動化。 これは、企業がロボット工学への無駄のない参入をどのように達成できるか、またロボットを統合する際に責任者がどのような要件を習得する必要があるかを示すことを目的としています。 Artiminds Robotics は、シンプルで直感的なプログラミングとロボットの一貫した使用を専門とするソフトウェア会社です。 ウェビナー シリーズには XNUMX つの日程と XNUMX つの主要トピックが含まれています。
11.05.2020/20/2020 | Artimins は XNUMX 年 XNUMX 月 XNUMX 日にウェビナー シリーズを開始します ロボットで自動化。 これは、企業がロボット工学への無駄のない参入をどのように達成できるか、またロボットを統合する際に責任者がどのような要件を習得する必要があるかを示すことを目的としています。 Artiminds Robotics は、シンプルで直感的なプログラミングとロボットの一貫した使用を専門とするソフトウェア会社です。 ウェビナー シリーズには XNUMX つの日程と XNUMX つの主要トピックが含まれています。
ロボットの使用に関するウェビナー
ウェビナー 5のヒント 高速かつ柔軟で将来性のあるロボットの使用については、次の背景に基づいてロボットを迅速かつ持続的に統合できる方法を示しています。ロボットにより、あらゆる規模の企業が柔軟かつコスト効率よく自動化できるようになります。しかし、技術的な複雑さ、ハードウェア技術の高コスト、従業員のトレーニング努力などが、企業がロボット工学の導入を妨げていることがよくあります。
ロボットプログラミングウェビナー
ウェビナーでは、メーカーに依存しないシンプルなロボットプログラミング – これが始め方です ロボット工学では、参加者は Artiminds Robot Programming Suite ソフトウェアを使用してアプリケーションを柔軟かつ簡単に構成する方法を具体的に学びます。 センサー-コンポーネントを堅牢に統合し、オンラインとオフラインのプログラミングを相互に組み合わせます。
 Ctrlx オートメーション |サードパーティのハードウェア
Ctrlx オートメーション |サードパーティのハードウェア
Artiminds のウェビナー講演者兼ビジネス開発マネージャーであるモリッツ・ローテ氏は次のように説明します。 柔軟性、高精度、デジタル製造環境がこの発展の原動力となっています。 同時に、提供されるロボットの種類はますます多様かつ複雑になっていますが、専門のロボット工学の専門家が不足しています。 このウェビナーでは、ソフトウェアがここでどのように役立つかを示します。」
ロボット工学ウェビナーの詳細
ウェビナーへの参加は無料です。 ウェビナーは 60 分間で、英語でも提供されます。 日付は次のとおりです。
ロボットを使用するためのウェビナー5のヒント
- 20月11日午前00時、午後14時
- 27月11日午前00時、午後14時
- 29月10日午前00時
ロボットプログラミングウェビナー
- 20月12日午前30時
- 26月11日午前00時、午後14時
- 29月12日午後00時
よくある質問
ロボットはどの言語でプログラムされていますか?
ロボットは、その複雑さ、応用分野、および特定のロボット制御に応じて、さまざまなプログラミング言語でプログラムされます。言語の選択は、それぞれのプロジェクトの要件と既存のインフラストラクチャによって異なります。最も一般的な言語には次のようなものがあります。
- ロボット工学に特化した言語:多くのロボットメーカーは、自社のシステムに合わせた独自のプログラミング言語を開発しています。この例としては、Kuka KRL や ABB Rapid があります。
- 標準言語: Python、C++、Java などの確立された高級言語は、より複雑なタスクや既存の IT システムへの統合によく使用されます。 Python は、そのシンプルさと豊富なライブラリのおかげで、学術研究やプロトタイプの開発に特に役立つことが証明されています。
- ブロックベースのグラフィカルプログラミング言語: トレーニング目的やロボット工学への入門には、Blockly、Scratch などの直感的でグラフィカルなプログラミング環境、または Lego Mindstorms などの特殊なソフトウェアがよく使用されます。これらにより、プログラミングの豊富な知識がなくてもロボットを制御できます。
- 特殊なコード 機械学習と KI: 人工知能や機械学習を必要とするアプリケーションは、Tensorflow や Pytorch など、Python や C++ で書かれた特殊なフレームワークやライブラリを使用します。
ティーチインプログラミングはどのように行われますか?
死 ティーチインプログラミングは、 産業用ロボットやその他の自動化システムをプログラミングするための直感的でユーザーフレンドリーな方法。これにより、複雑なコード行を記述するのではなく、手動によるガイダンスや位置の直接入力を通じて、ロボットに特定の動きやタスクを教えることができます。