設計・開発のオンラインマガジン
会社のニュース



専門分野からの建設と開発に関する業界ニュース

製品開発
IDTA |将来に向けてデジタルツインを準備する


センサー
新しいセンサークラスにより、位置決めタスクが大幅に簡素化されます

ケーブルとワイヤー
PTFEおよびPFASフリーのチェーンフレックスケーブル




支店からの建設と開発に関する業界ニュース


モバイル機械
自動運転フォークリフト用のオーダーメイドブレーキ


自動車
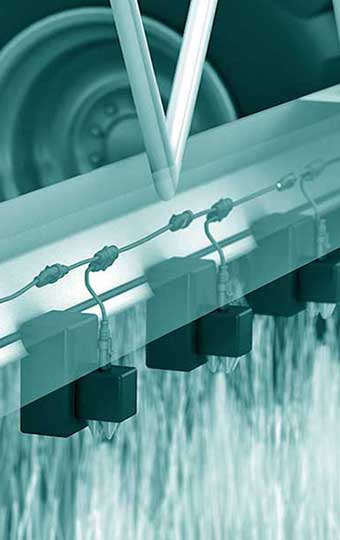
IO モジュールが ReSat の水素充填ステーションを確保








業界フェアニュース
高速飛行時間測定方式の距離センサー
- 詳細
- ヒット数:9858
航空管制レーダーとか ライダー 気象学では、どちらの方法も同じ原理に基づいています。つまり、信号が放射され、測定対象の物体によって反射されます。距離は通過時間の測定を測定することで非常に簡単に決定できます。このいわゆる 飛行時間-テクノロジーは新しいものの基礎でもあります 距離センサ PMDOGDシリーズの IFMエレクトロニック.

コンテンツ
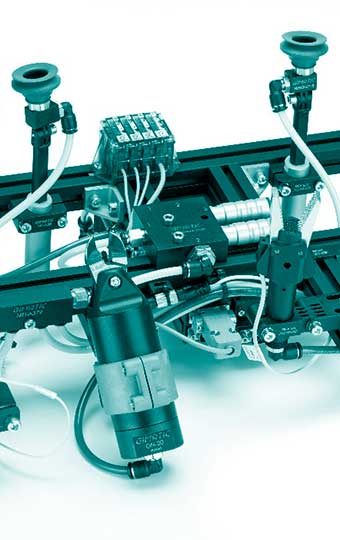
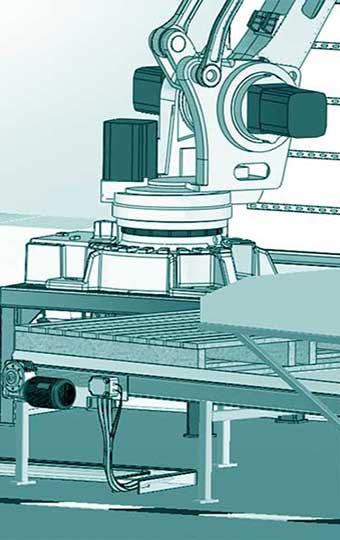
位置または距離は多数でなければなりません 産業用アプリケーション 決断される。 自動組立システム、倉庫ロジスティクスシステム、生産機械はほんの一例です。 距離センサーに課せられる要件は大きく異なる可能性があります。 精度、速度、堅牢性、干渉に対する耐性などは、距離センサーが持つ必要のある典型的な特性です。
レーザー光による通過時間測定を備えた距離センサー
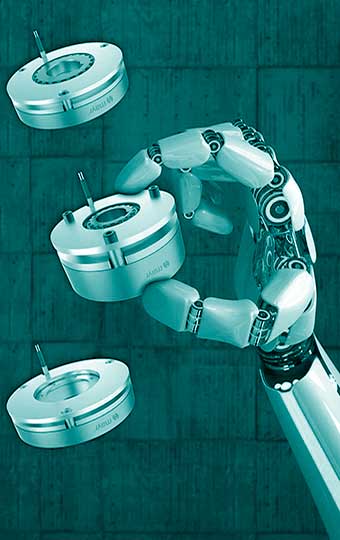
距離を測定するための非常に正確で同時に非常に高速な方法は、飛行時間測定または 飛行時間 (TOF)。 PMD OGD距離センサーは、この方法に従って機能します。 距離センサーは、レーザークラス1の変調された赤色レーザー光を送信し、光がセンサーからオブジェクトに移動して再び戻るまでにかかる時間を決定します。 このようにして、物体までの距離を簡単かつ高精度に決定することができます。
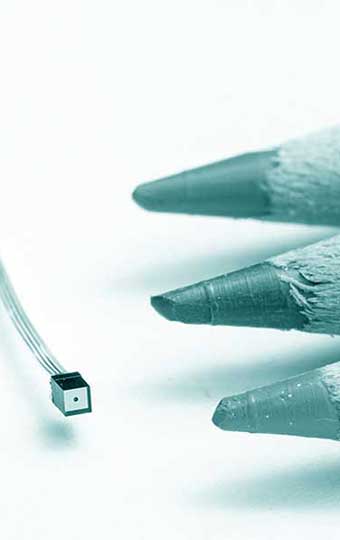
距離センサーはで利用可能です XNUMXつのバージョン:PMD OGD Longe Rangeバージョンは、最大1500 mmの範囲に適しており、たとえば、倉庫ロジスティクスのマテリアルハンドリングアプリケーションで使用されます。 PMD OGD Precisionバージョンは、最大300 mmの距離を測定でき、ミリメートルの精度でこれらを決定します。 距離センサーは、スキャン範囲にもよりますが、光点径が約1mmであるため、それに応じて小さな部品も確実に検出できます。 これにより、距離センサーは、自動組み立てのオブジェクトに特に適しています。たとえば、いわゆるエラー防止アプリケーションで使用できます。
彼は最小の部品の正しい組み立てをチェックすることができます。 そのような インライン品質チェック オブジェクトの数は、高品質のアセンブリを保証するだけでなく、コストの削減にも役立ちます。 一般に、次のことが当てはまります。エラーが後で検出されるほど、結果として生じるコストは高くなります。
エラーはファイナルにのみ表示されますか Qualitätskontrolle オブジェクトによって発見された、またはさらに悪いことに、顧客に配達された後でのみ、エラーを修正するための努力は非常に高くなります。 一方、適切なセンサーシステムが故障した組み立てステップの直後に故障を検出した場合、比較的簡単に修正できます。 または、影響を受けるパーツを生産から削除することもできます。
自身の生産でテスト済み
PMD OGD Precisionをインライン品質チェックにどれだけうまく使用できるかは、メーカーが独自に持っているものです。 テットナングでのセンサー製造 実証された。 センサーは、生産中の自動組立ラインで組み立てられます。 必要な高度な保護を確保するために、組み立て前にシールリングを挿入する必要があります。 このシールリングがない場合、組み立て中に必ずしも気付かれることはありません。
正しく取り付けられていない距離センサーは機能しますが、湿気の侵入に対して適切に保護されていません。 このようなセンサーを納品した場合、周囲の状況によっては故障やお客様からの苦情があります。 シーリングリングの存在チェックは、PMD OGDPrecisionを使用してテストステーションで実装されました。 距離センサーは 100パーセントの信頼性 厚さわずか2mmのシールリングが、そのために設けられた溝に挿入されたかどうかを認識します。

日ごとに TOF測定方法 は干渉に対して非常に堅牢であり、この信頼性は困難な環境条件下でも達成できます。 たとえば、干渉光源は問題ありません。測定は、表面の色に関係なく機能します。 上記の自動アセンブリでの小さなコンポーネントの存在チェックは、他のセンサー原理を適用するのが難しい表面でも機能します。 この典型的な例は、反射面であり、油膜または上記のシールリングなどの非常に暗い物体で表面を濡らします。
コンパクトな問題解決ツールとしての ToF センサー
 死 光学センサー PMD OGDシリーズがひとつに コンパクトなハウジング 収納されており、M18ネジで簡単に取り付けることができます。 この標準的な取り付けの代わりに、ハウジングのXNUMXつの穴を使用できます。 はっきりと見える赤いレーザーポイントにより、センサーのセットアップが非常に簡単になります。
死 光学センサー PMD OGDシリーズがひとつに コンパクトなハウジング 収納されており、M18ネジで簡単に取り付けることができます。 この標準的な取り付けの代わりに、ハウジングのXNUMXつの穴を使用できます。 はっきりと見える赤いレーザーポイントにより、センサーのセットアップが非常に簡単になります。
ハウジングの背面にあるPMDOGDには、ディスプレイとXNUMXつのボタンがあります。 操作。 これにより、セットアップが非常に簡単に実行できます。 ディスプレイには、動作中の距離の現在の測定値が表示され、センサーの切り替えステータスに応じて、ディスプレイの点灯が赤と緑の間で変化します。 ハウジング上部のXNUMXつのLEDもスイッチングステータスを示しているため、使用中はすべての方向からすぐに確認できます。
IO-Linkインタフェースでフレキシブル
ほとんどのメーカーのセンサーと同様に、PMDOGDには IO-Linkインターフェース 取り付けられています。 これにより、測定値が送信されるだけでなく、IO-Linkマスターからセンサーをパラメーター化することもできます。 これにより、PMDOGDの使用がさらに柔軟になります。
たとえば、異なる製品の組み立てのために生産が切り替えられた場合、センサーには新しいパラメーター化が与えられるだけです。生産はその後すぐに続行できます。 これにより、実稼働環境を非常に柔軟に適応させることができます。 IO-Linkインターフェースには、メンテナンスとサービスの面でも利点があります。センサーを交換する必要がある場合は、パラメーター化を交換用デバイスに簡単に転送できます。 これにより、ダウンタイムが大幅に短縮されます。
インダストリー4.0アプリケーションへの統合
IO-Linkインターフェースは、上位レベルのシステムとのシームレスな通信も保証します。 これは、継続的な依存に依存するインダストリー4.0の概念の実装です 通信 PMD OGDシリーズの新しいセンサーにより、センサーレベルからクラウドまでが可能です。
よくある質問
飛行時間はどのように機能しますか?
飛行時間 (ToF) は、飛行時間を決定するための測定方法です。 物体の距離s. 信号 (多くの場合、光またはレーザー光線) を送信し、信号が物体に到達してセンサーに戻るまでにかかる時間を測定することによって機能します。 「飛行時間」として知られる測定時間は、既知の信号の伝播速度 (レーザー ビームの光の速度など) に基づいて、物体までの距離を計算するために使用されます。 ToF センサーは、3D カメラ、自動車の距離測定、ロボット工学などのさまざまなアプリケーションで使用されています。
ToF カメラはどのように機能しますか?
飛行時間型カメラ (Tof) は、次の方法で視野内のオブジェクトまでの距離を測定します。 光パルス (多くの場合赤外線)、これらのパルスが物体から反射されてカメラに戻るまでにかかる時間を測定します。カメラセンサーのすべてのピクセルは、この時間を測定するように設計されています。解像度のピクセルごとに「飛行時間」を計算することにより、3D カメラは、視野内のオブジェクトの距離と形状に関する情報を含むシーンの 3D 画像を作成できます。
ToF カテゴリに属するセンサーはどれですか?
ToF センサーは、物体の距離や場合によっては形状に関する情報を得るために、時間を測定する原理に基づいています。飛行時間 (ToF) センサーには次のものが含まれます。
- ToFカメラ: 飛行時間型カメラは、視野内の物体から反射された光パルスの飛行時間を測定することで 3D 画像をキャプチャします。
- レーザ- 距離計: ToF 原理を使用して、レーザー光線が物体に到達して戻ってくるのにかかる時間を測定することで、物体までの距離を測定します。
- 超音波 ToF センサー: レーザー距離計に似ていますが、光の代わりに超音波を使用します。
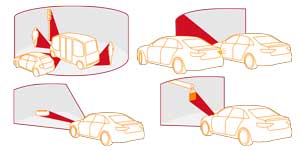
- ToFライダー-センサー (光検出と測距): Tof ベースの LIDAR センサーは、周囲の複数の地点までの距離を測定します。これは、詳細な 3D マップの作成や、車両、特に自動運転車のナビゲーション システムに使用されます。
あなたは下記にもご興味がおありかもしれません...



IFMエレクトロニック | 誰もが使えるテクノロジー


