プログラミングロボット | ソフトウェアとコントロール
- 詳細
- ヒット数:7685
それくらいなら 産業用ロボット または コボット 行為:適切なし ソフトウェア そしてインタラクティブなもの ロボットのプログラミング 何もない、または何も簡単に機能しません。 クラウドベースのプログラムや 人工知能 ロボットのプログラミングはより簡単かつ効率的になってきています。 これをどのように行うことができるか、またこれにどのようなソフトウェアがすでに利用可能であるかを読んでください。

コンテンツ
- 公差のあるプロセス向けのスマートロボットソフトウェア
- センサー適応ロボティクスのパートナー
- ユーザーインターフェイスによりロボットとの対話が簡素化されます
- XNUMXつのプラットフォームでのCNC + XNUMXロボットプログラミング
- 自動THTアセンブリのロボットプログラミング
- Artimindがウェビナーにロボット自動化を開始するように通知します
- 3Dプリント用のABBロボットにより、ソフトウェアの準備が整いました
- 組立自動化のためのインテリジェントロボットソフトウェア
- カメラベースのセンサー ソフトウェアにより、ロボット グリッパーが次の情報を確認できるようになります。
- Häufiggestellte Fragen
公差のあるプロセス向けのスマートロボットソフトウェア
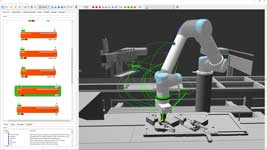 29.02.2024 年 XNUMX 月 XNUMX 日 |従来のアプローチを試してみると、 公差の対象となるプロセス これは多くの場合、自動化することが大きな課題となります。のスマートロボットソフトウェアを使用すると、 Artimindのロボット工学 信頼性の高いソリューションを非常に簡単に作成できます。さまざまな実装例が幅広いアプリケーションを示しています。
29.02.2024 年 XNUMX 月 XNUMX 日 |従来のアプローチを試してみると、 公差の対象となるプロセス これは多くの場合、自動化することが大きな課題となります。のスマートロボットソフトウェアを使用すると、 Artimindのロボット工学 信頼性の高いソリューションを非常に簡単に作成できます。さまざまな実装例が幅広いアプリケーションを示しています。
センサー適応ロボティクスのパートナー
 22.06.2023 | Artimindのロボット工学 にプレゼントする AUTOMATICA 2023年は社内で ソフトウエアソリューション プログラムされたアプリケーション。 Robot Programming Suite (RPS) および Artiminds Learning & Analytics for Robots (LAR) ツールは、ローコード アプローチによりセンサーベースのロボット アプリケーションのプログラミングを簡素化します。これにより、これまで手動でしか解決できなかった生産タスクを自動化できるようになります。
22.06.2023 | Artimindのロボット工学 にプレゼントする AUTOMATICA 2023年は社内で ソフトウエアソリューション プログラムされたアプリケーション。 Robot Programming Suite (RPS) および Artiminds Learning & Analytics for Robots (LAR) ツールは、ローコード アプローチによりセンサーベースのロボット アプリケーションのプログラミングを簡素化します。これにより、これまで手動でしか解決できなかった生産タスクを自動化できるようになります。
ユーザーインターフェイスによりロボットとの対話が簡素化されます

30.05.2023 年 XNUMX 月 XNUMX 日 | ユーザーインターフェースの場合 Kuka.Usertech Kuka はロボット コントローラーの構成を簡素化しました。 ユーザーフレンドリーなインターフェイスにより、ソフトウェア拡張機能を使用したアプリケーション コマンドの作成と使用が簡単になります。 このソフトウェアは、Kuka Robot Language (KRL) の複雑なルーチンを介したグラフィカル ユーザー インターフェイス (GUI) を備えたエディターを介して、シンプルなインライン フォームとステータス キーをユーザーに提供します。 ロボットをプログラミングするためのこれらのアプリケーション コマンドは、たとえば、個々のアプリケーションのステータス キーとして、または動作プロセス全体のスクリプトの形式で、Kuka.Workvisual で作成されます。
これまでに Kuka.Usertech を使用したことがない場合でも、作成したインライン フォーム、ステータス キー、ボタン、メッセージを使用して、オペレーター パネルにロボット コントロールを簡単にセットアップできます。 ステータスキー は、頻繁に繰り返されるコマンドをすばやく簡単に入力するために使用されるスマートパッド上のボタンです。 インラインフォーム は、KRL ルーチンを問題なく使用できるテンプレートの形式で事前定義された入力マスクです。

ロボット コントローラーは、インターフェイスのユーザー インターフェイスを介してわずか数ステップで設定でき、ロボットはすぐに操作できる状態になります。
Kuka の展示物 EMO 2023.
ドラッグアンドドロップによる素早い起動
新しいユーザー インターフェイスは、特に優れたスコアを備えています。 操作方法 (UX)。 標準ユーザー インターフェイスを備えた PC 上の直観的なエディターにより高い効率が保証され、ドラッグ アンド ドロップを使用して構成ファイルを迅速かつ簡単に作成するオプションが提供されます。 ユーザー エクスペリエンス設計により、KRL への介入は必要ありません。 その後、コマンドはオプション パッケージとしてコントローラー用の Kuka Smartpad ハンドヘルド コントロール ユニットに転送されます。 これにより、ユーザー インターフェイスでのコピー エラーが回避されます。 ロボットはすぐに使用できるようになります。
死 事前設定された インライン フォームを使用すると、コンピューター エディターを人間がより安全に使用できるようになります。 入力エラーはグラフィカル ユーザー インターフェイスに直接表示され、ロボット コントローラーのテスト時に発見されるだけではありません。 Kuka.Usertech インターフェイスは、メーカーのすべてのテクノロジー パッケージと組み合わせることができます。
Kuka の展示物 AUTOMATICA 2023.
XNUMX つのプラットフォームでの CNC とロボットのプログラミング
 15.02.2022 年 XNUMX 月 XNUMX 日 | の統合により、 ロボット 工作機械では自動化の利点を最大限に活用できます。 統合プログラミング環境の開発により、 三菱電機 直接 ロボットコントローラー、CNC マシニング センターの G コードを介してロボットをプログラムできます。
15.02.2022 年 XNUMX 月 XNUMX 日 | の統合により、 ロボット 工作機械では自動化の利点を最大限に活用できます。 統合プログラミング環境の開発により、 三菱電機 直接 ロボットコントローラー、CNC マシニング センターの G コードを介してロボットをプログラムできます。
自動THTアセンブリのロボットプログラミング
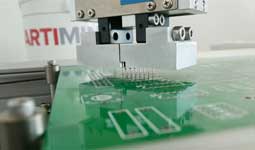 30.09.2020/XNUMX/XNUMX | ロボット プログラミング スイート RPS の Artimindのロボット工学 の自動化を可能にします THTアセンブリ。 ロボット プログラミング ソフトウェアは、すべてドラッグ アンド ドロップを使用して、表面のスキャンや接合の制御などの力で制御されるプロセスを産業用ロボットに教えます。
30.09.2020/XNUMX/XNUMX | ロボット プログラミング スイート RPS の Artimindのロボット工学 の自動化を可能にします THTアセンブリ。 ロボット プログラミング ソフトウェアは、すべてドラッグ アンド ドロップを使用して、表面のスキャンや接合の制御などの力で制御されるプロセスを産業用ロボットに教えます。
Artimindがウェビナーにロボット自動化を開始するように通知します
 11.05.2020/20/2020 | Artimins は XNUMX 年 XNUMX 月 XNUMX 日にウェビナー シリーズを開始します ロボットで自動化。これは、企業がロボット工学への無駄のない参入を達成する方法と、責任者がロボットを統合する際に習得する必要がある要件を示すことを目的としています。ウェビナー シリーズには 9 つの日程と 2 つの主要トピックが含まれます。
11.05.2020/20/2020 | Artimins は XNUMX 年 XNUMX 月 XNUMX 日にウェビナー シリーズを開始します ロボットで自動化。これは、企業がロボット工学への無駄のない参入を達成する方法と、責任者がロボットを統合する際に習得する必要がある要件を示すことを目的としています。ウェビナー シリーズには 9 つの日程と 2 つの主要トピックが含まれます。
3Dプリント用のABBロボットにより、ソフトウェアの準備が整いました
 13.01.2020 | ABBロボット のために 3Dを印刷 わずか30分でプログラムできます。 この目的のために、シミュレーションおよびオフラインプログラミングソフトウェア「Robotstudio」に機能が統合されています。 ノベルティは初めて上映されます ロボット工学 フェアアイレックスが日本で発表されました。 Powerpac ポートフォリオの一部である新しいソフトウェアのおかげで、企業は手動でプログラミングを実行する必要がなくなり、プログラミングを実行できるようになりました。 3D印刷コンポーネント より速く製造できます。
13.01.2020 | ABBロボット のために 3Dを印刷 わずか30分でプログラムできます。 この目的のために、シミュレーションおよびオフラインプログラミングソフトウェア「Robotstudio」に機能が統合されています。 ノベルティは初めて上映されます ロボット工学 フェアアイレックスが日本で発表されました。 Powerpac ポートフォリオの一部である新しいソフトウェアのおかげで、企業は手動でプログラミングを実行する必要がなくなり、プログラミングを実行できるようになりました。 3D印刷コンポーネント より速く製造できます。
Robotstudio の一部として、3D プリント Powerpac はさまざまな機能をサポートしています。 3Dプリンタ アプリケーション。 その中には、顆粒またはコンクリートを使用した溶接および印刷があります。 少量多品種少量生産に適しています。
XNUMX分でモデリング
Konventionelle, maschinelle 3D-Druckverfahren sind zeitaufwendig: Für die Programmierung der Druckpfade sind Millionen Punkte und Bahnen zu plotten.従来の自動化されたXNUMXD印刷プロセスには時間がかかります。印刷パスをプログラムするには、何百万ものポイントとパスをプロットする必要があります。 Mit demとともに 3D印刷Powerpac lässt sich das Standard-Slicer-Softwaredesign in die Simulationsumgebung und den ABB Roboter-Code „übersetzen“.標準のスライサーソフトウェア設計は、シミュレーション環境とABBロボットコードに「変換」できます。 Damit können Anwender das CAD-Design bis hin zur finalen Modellierung des Produkts in einer halben Stunde realisieren.これにより、ユーザーはCAD設計から製品の最終モデリングまでXNUMX分で実装できます。
 AIベースのロボットキャリブレーションのための研究プロジェクト
AIベースのロボットキャリブレーションのための研究プロジェクト
市場研究者のMarkets + Marketsによると、3D印刷の市場は2024年までに開くと予想されています 34,8ミリアーデンUSドル anwachsen.成長する。 Dies ist auch auf die Entwicklung neuer, industrieller 3D-Druck Filament zurückzuführen.これは、新しい工業用XNUMXD印刷フィラメントの開発によるものでもあります。
「当社の 3D プリンティング ソフトウェアを使用すると、より高速な 3D プリンティングをお客様に提供できます。 当社の高性能 ABB ロボットを使用することで、企業は多くの産業用途向けに高品質のオブジェクトを効率的に生産できるようになりました」と強調します。 スティーブン・ワイアット, ABBのロボットおよびファクトリーオートメーション事業のポートフォリオおよびデジタル責任者。
組立自動化のためのインテリジェントロボットソフトウェア
 10.09.2018年XNUMX月XNUMX日| それか フラウンホーファーIPA は、ロボットのプログラミング作業を最小限に抑えるロボット ソフトウェア ドラッグ + ボットを紹介します。 グラフィカル ユーザー インターフェイスを介して複雑なロボット アプリケーションに迅速かつ直観的に組み合わせることができる、すぐに使用できるプログラム モジュールを提供します。
10.09.2018年XNUMX月XNUMX日| それか フラウンホーファーIPA は、ロボットのプログラミング作業を最小限に抑えるロボット ソフトウェア ドラッグ + ボットを紹介します。 グラフィカル ユーザー インターフェイスを介して複雑なロボット アプリケーションに迅速かつ直観的に組み合わせることができる、すぐに使用できるプログラム モジュールを提供します。
さらに、操作および入力補助により、ブロックのパラメーター化が簡素化されます。 したがって、異なるメーカーのロボットを再プログラミングするための専門知識は必要ありません。
ロボットのソフトウェアは ピタスク 力制御による組み立てプロセスでは、制御キャビネットの組み立てなど、以前は手動で実行されていたプロセスを経済的に賢明な方法で自動化できます。 このロボット ソフトウェアは、タスクをモデル化すると、新しいワークピースのバリエーション、他のロボット タイプ、および他のメーカーのロボットに転送できるため、革新的です。 さらに、モジュール式システムと同様の構造になっています。
ロボット ソフトウェアには、システム インテグレータがロボット システムをセットアップするときに個別に組み合わせたり、直接使用したりできる、多用途で再利用可能なプログラム モジュールが含まれています。 ピタスクが入ってる ドラッグ+ボット 統合されているため、簡単に使用できます。

たとえば、企業がアセンブリプロセスをより頻繁に自動化する場合、技術的および経済的に適切なプロセスを特定することが重要です。 この目的のために、IPAは自動化の潜在的な分析を提供します。これにより、企業はすべての組立作業場と生産ラインおよび適切な自動化の可能性に関する十分な根拠のある意思決定知識を受け取ります。 これにより、「クイックウィン」を体系的に開発し、これに基づいてコンセプトを作成および実装できます。
現在、初めて、この分析は、新しく計画されたソリューションと既存のソリューションを比較できるデータベースを含むアプリを使用して行われます。 これにより、計画プロセスが大幅に簡素化されます。
カメラベースのセンサー ソフトウェアにより、ロボット グリッパーが見ることができます
 17.06.2018年XNUMX月XNUMX日 | 彼らの研究に基づいて、それはスタートアップです Rovi ロボットビジョン 当社は世界で初めて、高価な従来の電子センサーを新しいソフトウェアと一般的なカメラに置き換えることに成功しました。 モーターを直接制御できるため、発明者らはこれを使用しました。 グラブ の Gimatic.
17.06.2018年XNUMX月XNUMX日 | 彼らの研究に基づいて、それはスタートアップです Rovi ロボットビジョン 当社は世界で初めて、高価な従来の電子センサーを新しいソフトウェアと一般的なカメラに置き換えることに成功しました。 モーターを直接制御できるため、発明者らはこれを使用しました。 グラブ の Gimatic.
Häufiggestellte Fragen
ロボットにはどのプログラミング言語が使用されますか?
ロボットもやってくる さまざまなプログラミング言語 モデルとアプリケーションに応じて制御されます。 C++ と Python は、特にロボット工学の研究開発でよく使用されます。 ROS (ロボット オペレーティング システム) は、ロボット工学向けに特別に設計されたツールとライブラリのコレクションも提供します。 言語の選択は、多くの場合、ロボットの複雑さと仕様に依存します。
ロボットはどうやってプログラムするのですか?
ロボットのプログラミングには、特定のソフトウェアと、多くの場合、関連するプログラミング言語が必要です。 まず、目的の動作シーケンスと機能を定義します。 次のような環境を使用する ROS (ロボット オペレーティング システム) またはメーカーの特別なソフトウェアを使用すると、ロボットに段階的に指示することができます。 ロボットのモデルによっては、グラフィカル インターフェイスやティーチイン手順を使用して、プロセスを直感的に行うこともできます。
Kuka はどのプログラミング言語を使用していますか?
Kukaロボットには社内プログラミング言語が使用されています KRL (KUKA ロボット言語) が使用されます。 KRL は、従来のプログラミング言語の機能とロボット工学用の特定のコマンドを組み合わせたものです。 これにより、ユーザーはロボットの正確な動作、ロジック、条件を定義できるため、さまざまな産業用途に合わせてロボットを最適化できます。
ロボットはどのように動くのでしょうか?
ロボットは、 の組み合わせ 機械、電子機器、ソフトウェア。 センサーは環境から情報を収集し、その情報はマイクロコントローラーまたはコンピューターによって処理されます。 プログラミング言語は、ロボットがどのように動作するかを指示します。 駆動システムとアクチュエーターはこれらのコマンドを物理的な動きに変換し、ターゲットを絞ったアクションを可能にします。
出典: この記事は、ABB、Artiminds、Fraunhofer、Kuka、Mitsubishi Electric、Rovi の企業からの情報に基づいています。
あなたは下記にもご興味がおありかもしれません...






3Dプリンター | プラスチック部品の積層造形

アンジェラ・ストラックは、開発スカウトの編集長であり、フリージャーナリストであり、リートにある Presse Service Büro GbR のマネージングディレクターでもあります。